龙泉驿城乡建设委员会网站yandex引擎搜索入口
户外机器人的定位导航相对于需要建图的场景来说,是比较简单容易实现的,因为可以借助第三方地图完成定位,并在第三方地图中完成路径规划和下发航点等操作,实现的难题在于如何控制机器人完成步行和转弯。
这些在不引进RTK高精度定位的前提下而言。由于存在干扰,以及传感器的精度可能不高,实际操作中,并不一定能够按期待的动作实现定位和导航。
笔者简单的搭了一个模拟机器人的程序,意在实现地图上的定位和快速导航,这样能快速理解其中的逻辑和一些简单的算法。
先看一下效果:
https://mp.weixin.qq.com/s/c783rHvsMxiH9a6IDtMCNA
废话不多说直接上程序,主要的处理逻辑如下:
while(GLOBAL_SWITCH)
{
if(onceread ==0)
{
onceread =1;
if(is_file_exist(“waypoints.csv”)!=0)//判断航点的文件是否存在
{
GLOBAL_STATUS=STOP_STATUS;
GLOBAL_SWITCH =0 ;
onceread =0;
DEBUG(LOG_ERR,“waypoint file is not exist \n”);
break;
}
}
if((latitude ==0.0)&&(longitude == 0.0))//是否定位成功
{
DEBUG(LOG_ERR,“GPS CANNOT LOCATION PLEASE CHECK \n”);
GLOBAL_STATUS = STOP_STATUS;
GLOBAL_SWITCH = 0;
break;
}if ((getmillis() - lastSubMillis > SUBSUMPTION_INTERVAL))//定时处理{switch(GLOBAL_STATUS){case STANDBY_STATUS://启动后的初始状态DEBUG(LOG_DEBUG,"STANDBY STATUS \n");lastGPSMillis =0 ;ReadWaypointsFile();//读取航点到队列CalculateHeadingToWaypoint();//计算当前角度和航点的方向CalculateDistanceToWaypoint();//计算当前和航点的距离GLOBAL_STATUS = ROTATE_STATUS ;break;case CACULATE_STATUS://计算状态DEBUG(LOG_DEBUG,"CACULATE STATUS \n");CalculateHeadingToWaypoint();CalculateDistanceToWaypoint();GLOBAL_STATUS = ROTATE_STATUS ;break;case ROTATE_STATUS ://旋转状态DEBUG(LOG_DEBUG,"ROTATE_STATUS \n");if (abs((int)car_heading_simulation - (int)targetHeading) > 10){RotateDegrees(targetHeading);//这里需要根据求出的角度进行转动,需要旋转的角度位 当前航向角-两点之间的角度,需要做-180~180之间的归一化}else {GLOBAL_STATUS = MOVE_STATUS ;}break;case MOVE_STATUS ://前进状态 DEBUG(LOG_DEBUG,"MOVE_STATUS \n");if((waypointRange > 200))//大于100m 认为不合法 所以规划路径时需要注意{ DEBUG(LOG_ERR,"distance > 200m \n");break;} MoveDistance(waypointRange);break; case WAYPOINTARRIVE_STATUS://读取下一个航点DEBUG(LOG_DEBUG,"WAYPOINTARRIVE_STATUS,currentWaypoint:%d,waypointCount:%d\n",currentWaypoint,waypointCount);if(currentWaypoint < waypointCount-1 ){currentWaypoint ++;DEBUG(LOG_DEBUG,"currentWaypoint ++\n");GLOBAL_STATUS = CACULATE_STATUS ;}else if(currentWaypoint >= waypointCount-1 ){GLOBAL_STATUS = STOP_STATUS ;DEBUG(LOG_ERR,"currentWaypoint >= waypointCount stop status\n");}break;case STOP_STATUS :break;case MANUAL_STATUS :break;default :break;}//end switch// 必须先运行一次 standby 状态 只有当在目的地附近3米内才会转换状态ret = isInRange(3, latitude , longitude, waypoints[currentWaypoint].latitude, waypoints[currentWaypoint].longitude);if (ret == 1) //点在圆圈内{ DEBUG(LOG_DEBUG,"arrive into circle scale ,will read next point \n");GLOBAL_STATUS = WAYPOINTARRIVE_STATUS ;}waypointlongitude = waypoints[currentWaypoint].longitude;waypointlatitude = waypoints[currentWaypoint].latitude;CalculateHeadingToWaypoint();//计算两点之间的角度int b_heading = abs((int)car_heading_simulation - (int)targetHeading);//获取当前航向和两点之间的差值DEBUG(LOG_DEBUG,"caculate b-heading:%d ,ret=%d \n",b_heading,ret);if ((b_heading > 10 )&&(ret != 1) ){GLOBAL_STATUS = ROTATE_STATUS ;}lastSubMillis = getmillis();}//end sub loop}//end while switch on
}
关于实现整套系统,需要搭建一个web服务器,然后使用MQTT协议实现通信,嵌入式中使用BOA来实现简单的web并包含地图的代码。
模拟程序依赖libmosquitto. 需要安装
sudo apt-get install mosquitto-dev
sudo apt-get install mosquitto-client
sudo find / -name “libmosquitto*.so”
找到后,将libmosquitto.so 替换MQtt文件下lib的libmosquitto.so库。
模拟程序使用c开发,直接 make就可以使用。
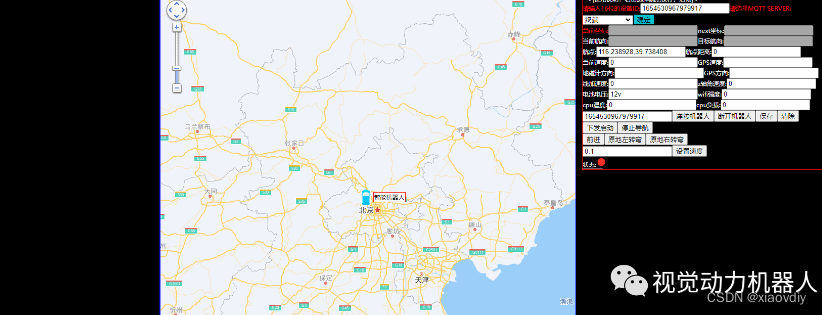
BOA搭建些许麻烦,可以使用 www.woyilian.com 中的仿真界面实现。如下图:
该工程的源码在这里下载:
请在链接末尾处下载。