德阳网站建设平台网推什么意思
文章目录
- 环境
- 安装
- 概述
- ros_control框架
- ros_control数据流
- 文件配置
- 附加工具
- 故障问题解决
- 参考
接前两篇:
ROS MoveIT1(Noetic)安装总结
Solidworks导出为URDF用于MoveIT总结(带prismatic)
MoveIT1 Assistant 总结
环境
- Ubuntu20.04;
- ROS1 Noetic;
- VMware
安装
sudo apt-get install ros-noetic-joint-state-controller
sudo apt-get install ros-noetic-effort-controllers
sudo apt-get install ros-noetic-position-controllers
sudo apt-get install ros-noetic-joint-trajectory-controller
sudo apt-get install ros-noetic-controller-manager
sudo apt-get install ros-noetic-gazebo-ros-control
sudo apt-get install ros-noetic-ros-controllers
概述
URDF 用于创建机器人模型、Rviz 可以显示机器人感知到的环境信息,Gazebo 用于物理环境仿真。
先在Moveit!端配置关节和传感器接口yaml文件,将其加载到rviz端;再在机器人端配置ros_control和接口yaml文件,将机器人加载到Gazebo。
最后同时启动加载有ros_control的Gazebo和加载有Moveit的rviz,达到联合仿真的目的。
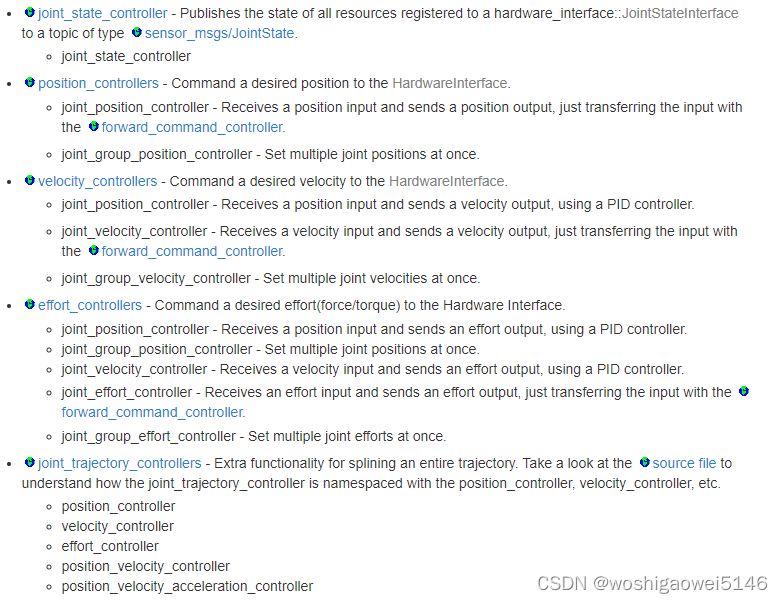
ros_control框架
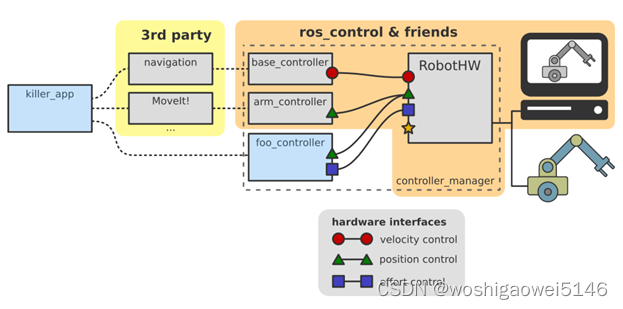
ros_control包由以下几部分:
-
combined_robot_hw(硬件包):一个允许将多个RobotHW组合成一个“RobotHW”的软件包。
-
controller_interface(controller接口)
-
controller_manager(controller管理器):提供了一个近乎实时的controller管理器,用于管理(加载、卸载、启停)controllers。
-
controller_manager_msg(controller管理器的消息类型):定义了controller的状态消息类型msg,以及调用controller_manager的服务类型srv。
-
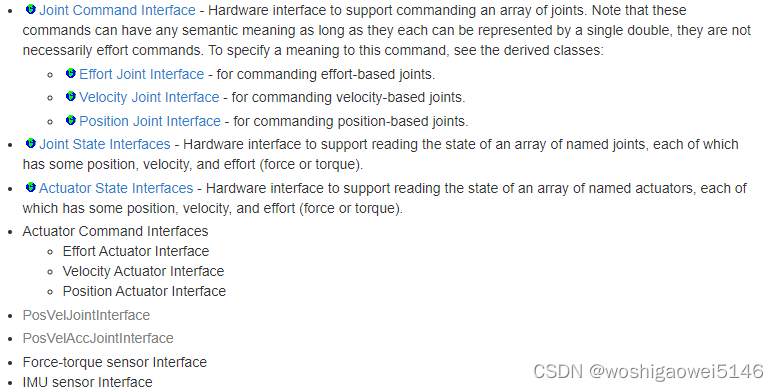
hardware_interface(硬件底层的接口):向硬件发送(write())命令并从硬件接收(read())联合状态。
https://github.com/ros-controls/ros_control/wiki/hardware_interface
-
joint_limits_interface(joints限制接口):根据URDF中的limit标签,将joint limit载入到硬件层中。
-
transmission_interface(传动接口):根据URDF中的transmission标签将该关系载入到硬件层中。
-
realtime_tools(实时控制工具):包含一组可以从硬实时线程中使用的工具,而不会破坏实时行为。
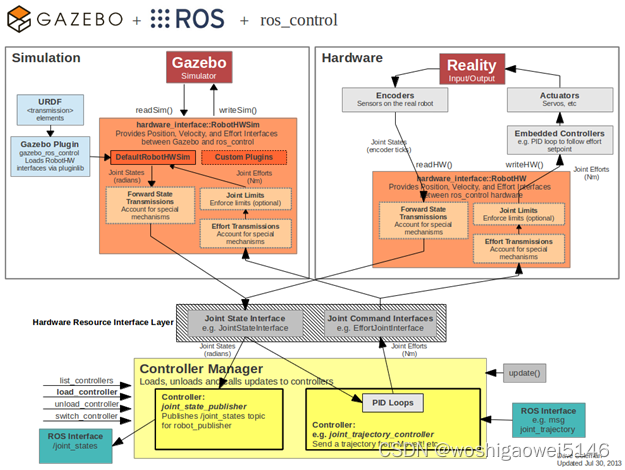
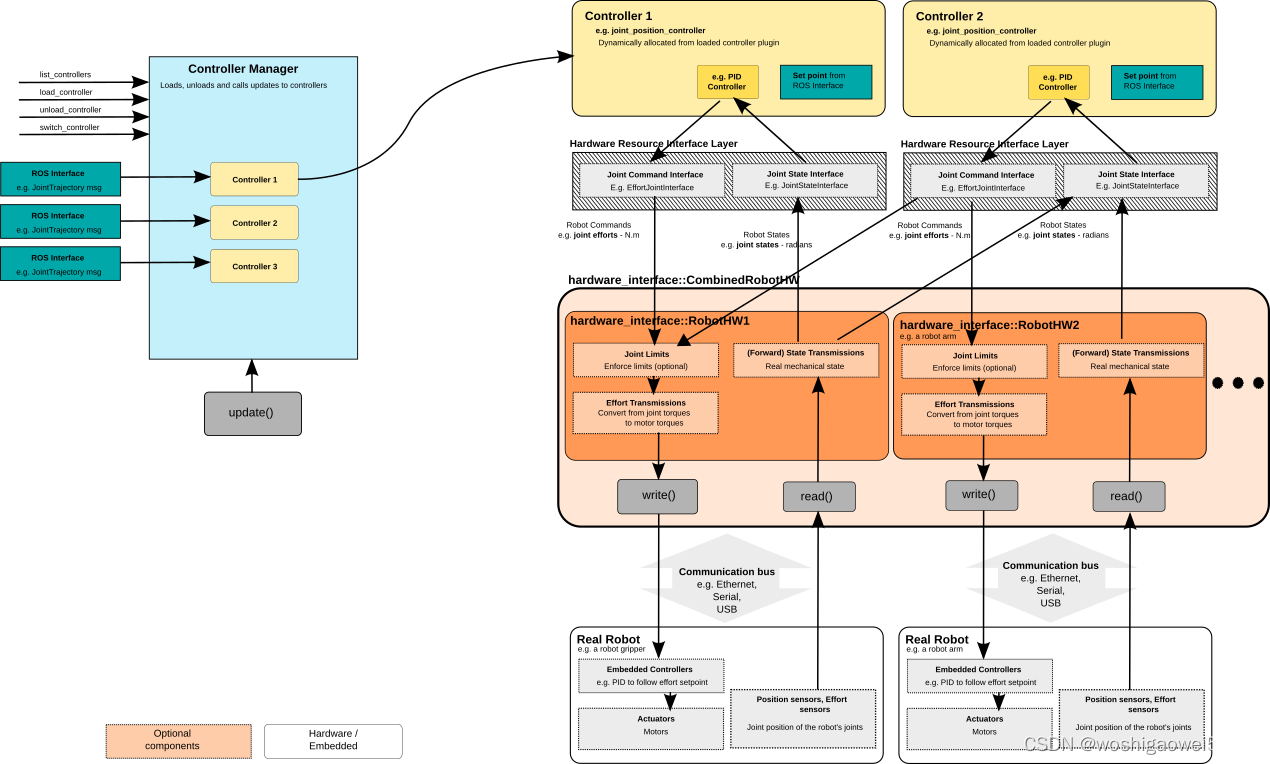
ros_control数据流
-
Controller Manager:每个机器人可能有多个controller,所以这里有一个控制器管理器的概念,提供一种通用的接口来管理不同的controller。controller manager的输入就是ROS上层应用的输出。
-
Controller:controller可以完成每个joint的控制,请求下层的硬件资源,并且提供了PID控制器,读取硬件资源接口中的状态,在发布控制命令。
-
Hardware Rescource:为上下两层提供硬件资源的接口。
-
RobotHW:硬件抽象层和硬件直接打交道,通过write和read方法来完成硬件的操作,这一层也包含关节限位、力矩转换、状态转换等功能。
-
Real Robot:实际的机器人上也需要有自己的嵌入式控制器,接收到命令后需要反映到执行器上,比如接收到位置1的命令后,那就需要让执行器快速、稳定的到达位置1。
【控制流】
ROS中的Controller manager接收load_controller、unload_controller等命令来加载和运行不同类型的controller(例如joint_position),这些controller通过Hardware Resource接口向硬件抽象层RobotHW读取和发布控制命令,这些命令再输入到机器人上的嵌入控制器上,然后有执行器执行。
文件配置
/home/gw2/ws_moveit/src/assis_1/config/robot_controller.yaml中定义的是"position_controllers/JointTrajectoryController",则URDF中定义的transmission中如果使用的是PositionJointInterface必须要对应,否则会提示找不到controller。
<transmission name="trans_Joint1"><type>transmission_interface/SimpleTransmission</type><joint name="Joint1"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint1_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission><transmission name="trans_Joint2"><type>transmission_interface/SimpleTransmission</type><joint name="Joint2"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint2_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission><transmission name="trans_Joint3"><type>transmission_interface/SimpleTransmission</type><joint name="Joint3"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint3_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission><transmission name="trans_Joint4"><type>transmission_interface/SimpleTransmission</type><joint name="Joint4"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint4_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission><transmission name="trans_Joint5"><type>transmission_interface/SimpleTransmission</type><joint name="Joint5"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint5_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission>
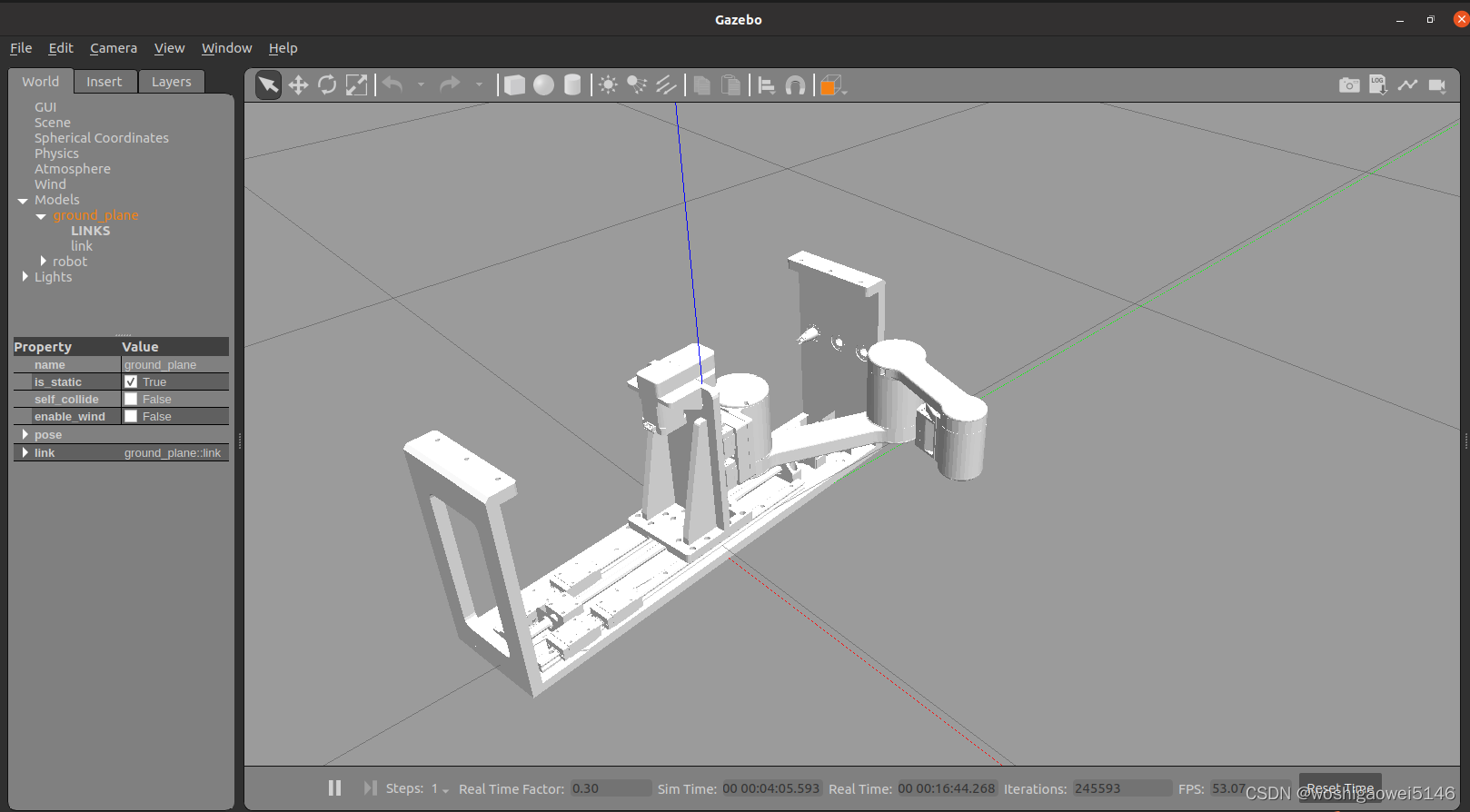
在urdf中加入gazebo的ros_control插件,如果不加,运行gazebo会显示机械臂都耷拉在地上,仿佛电机没有使能一样。
<gazebo><plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so"><plugin name="joint_state_publisher" filename="libgazebo_ros_joint_state_publisher.so"><jointName>Joint1,Joint2,Joint3,Joint4,Joint5</jointName></plugin><robotNamespace>/</robotNamespace></plugin></gazebo>
检查ros_controllers.launch的args="control"不要有空格。
修改ros_controllers.yaml:
control:type: position_controllers/JointTrajectoryControllerjoints:- Joint1- Joint2- Joint3- Joint4- Joint5gains:Joint1: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint2: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint3: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint4: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint5: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }
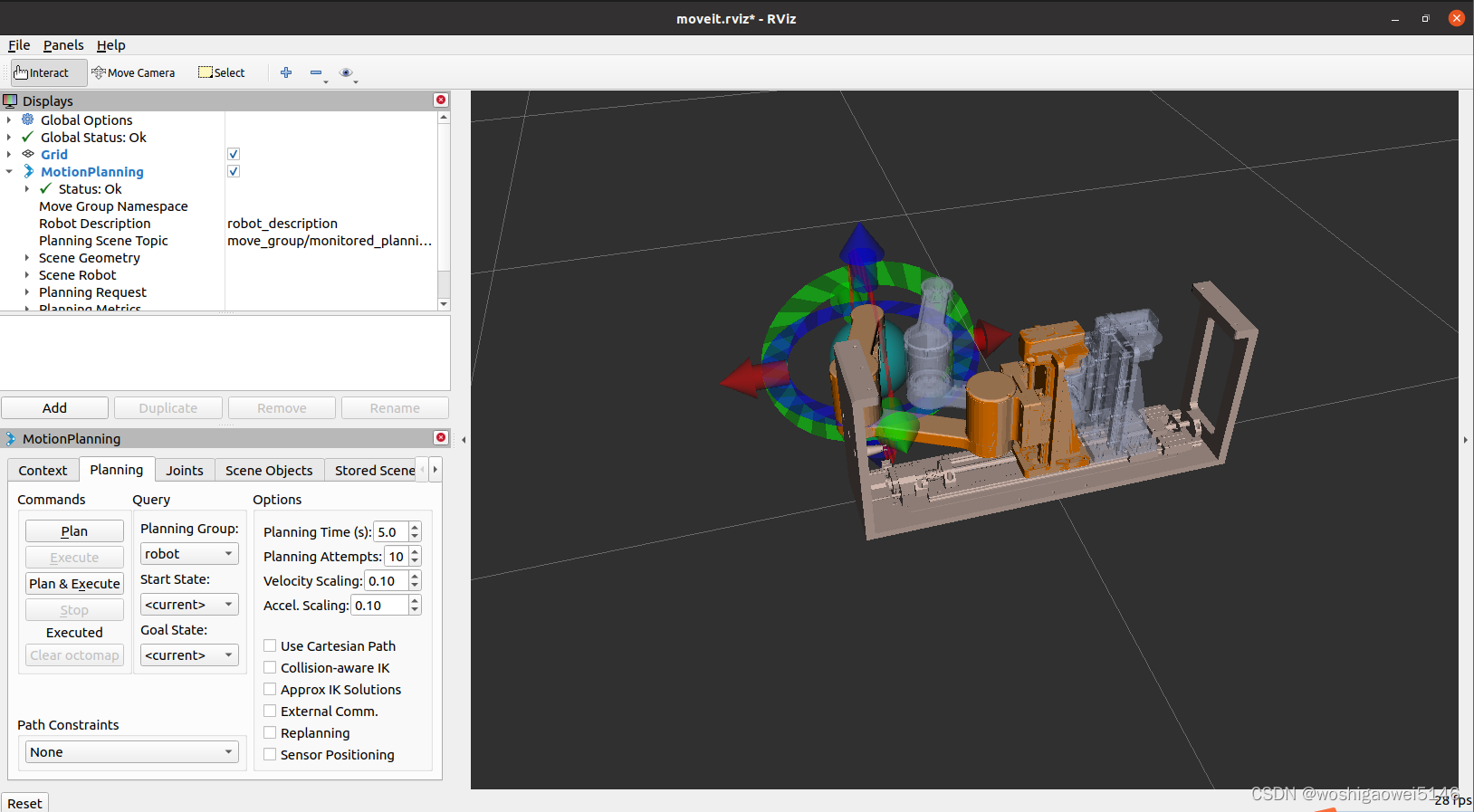
运行rviz和gazebo:
source ~/ws_moveit/devel/setup.bash
roslaunch assis_1 demo_gazebo.launch
可以看到Rviz中的运动在Gazebo中可以同步运动。
附加工具
rqt_graph
创建一个显示当前系统ROS程序运行情况的动态图形
安装:
sudo apt install ros-noetic-rqt
sudo apt install ros-noetic-rqt-common-plugins
运行:
rosrun rqt_graph rqt_graph
可以看到结果:
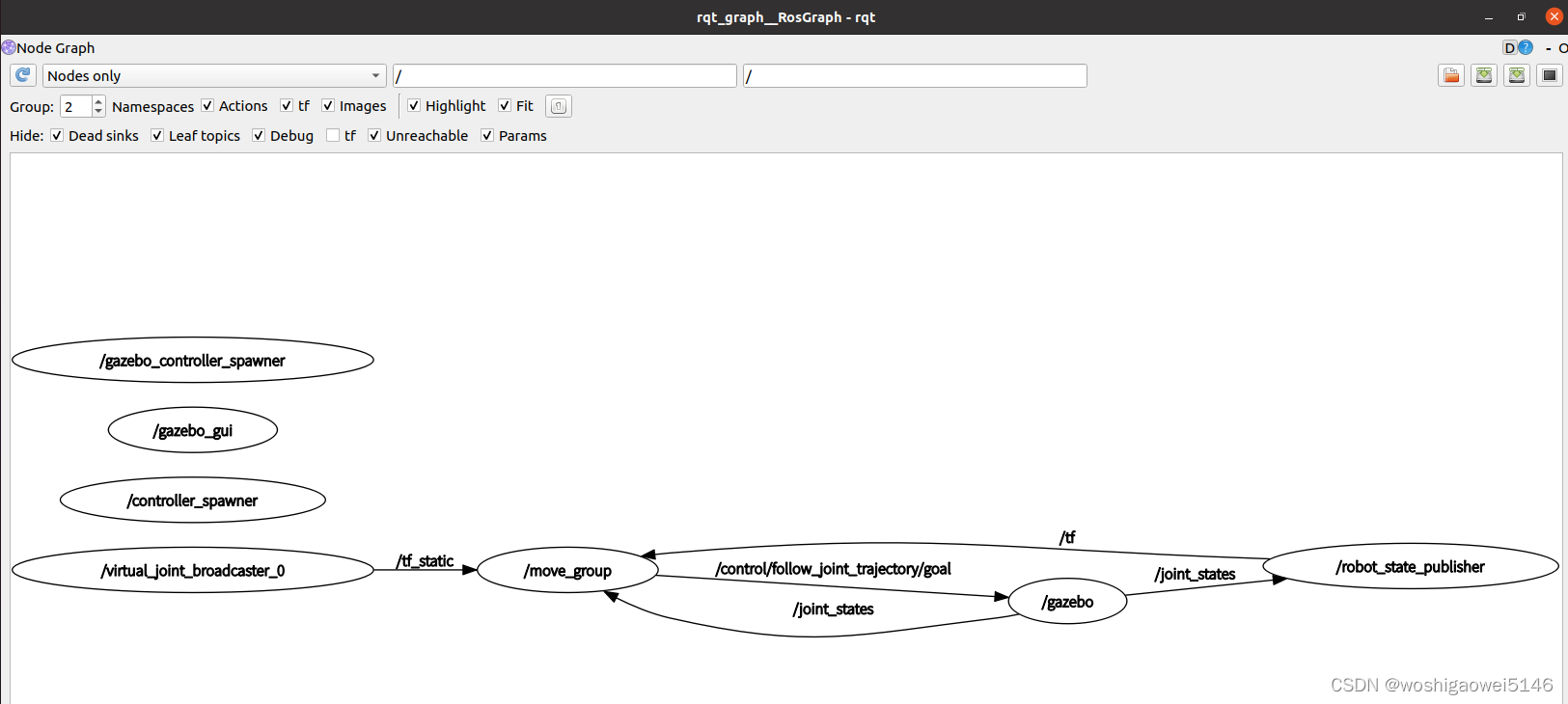
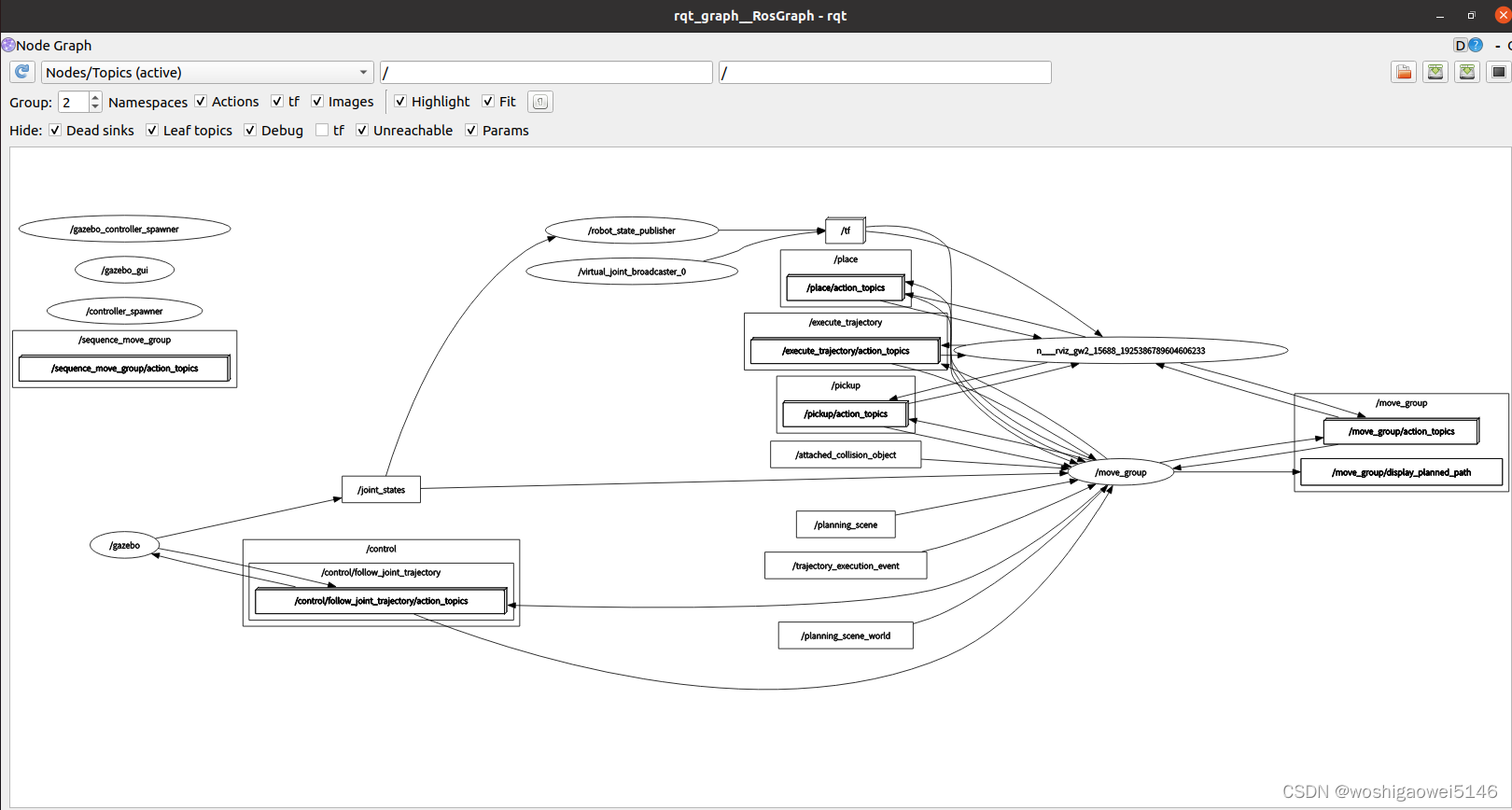
通过这个图可以看到:
/move_group发送/control/follow_joint_trajectory/goal【目标位置】到机器人,机器人发送/joint_states【轴状态】到/move_group和/robot_state_publisher
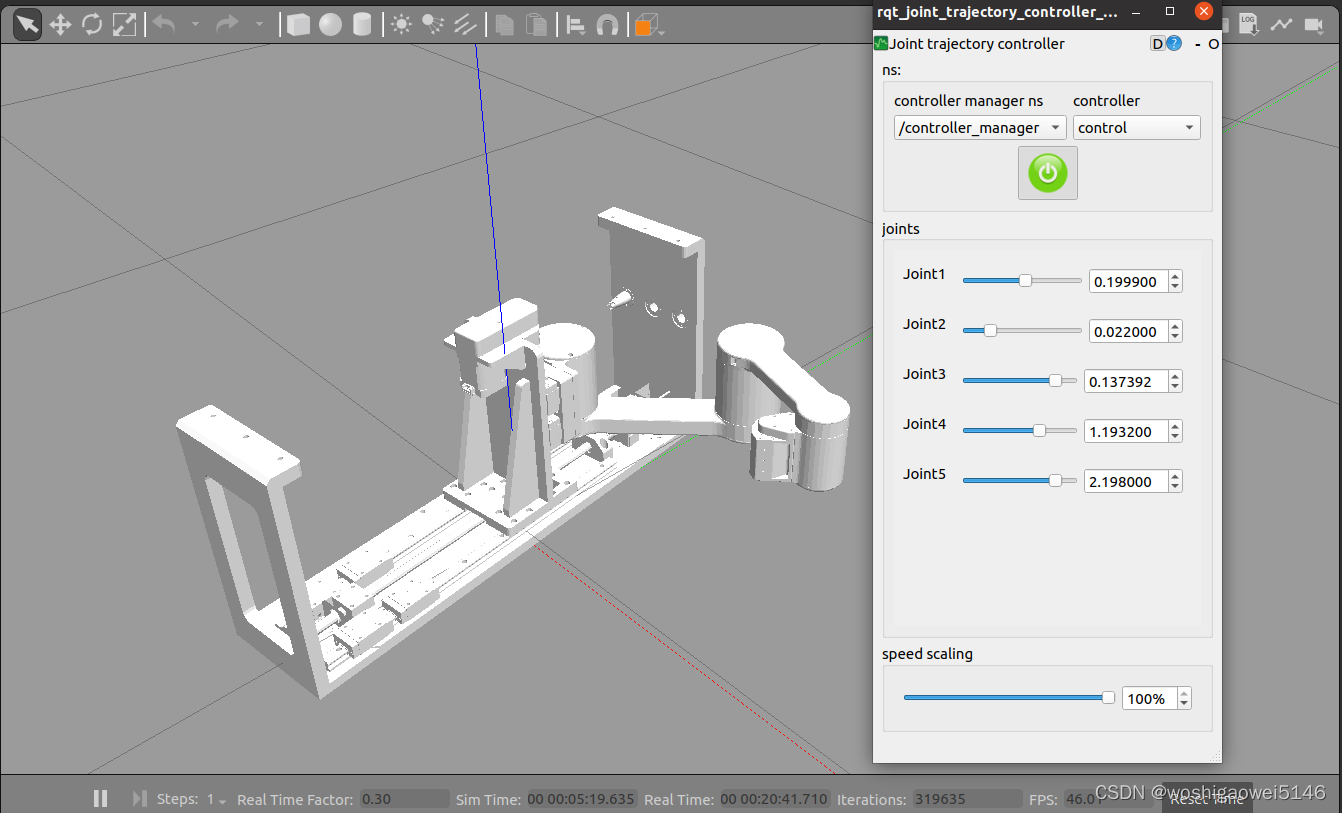
rqt_joint_trajectory_controller
安装:
sudo apt-get install ros-noetic-rqt-joint-trajectory-controller
运行:
roslaunch assis_1 demo_gazebo.launch 或 roslaunch assis_1 gazebo.launch
rosrun rqt_joint_trajectory_controller rqt_joint_trajectory_controller
效果:拖动进度条可以在Gazebo实现各个关节的运动。
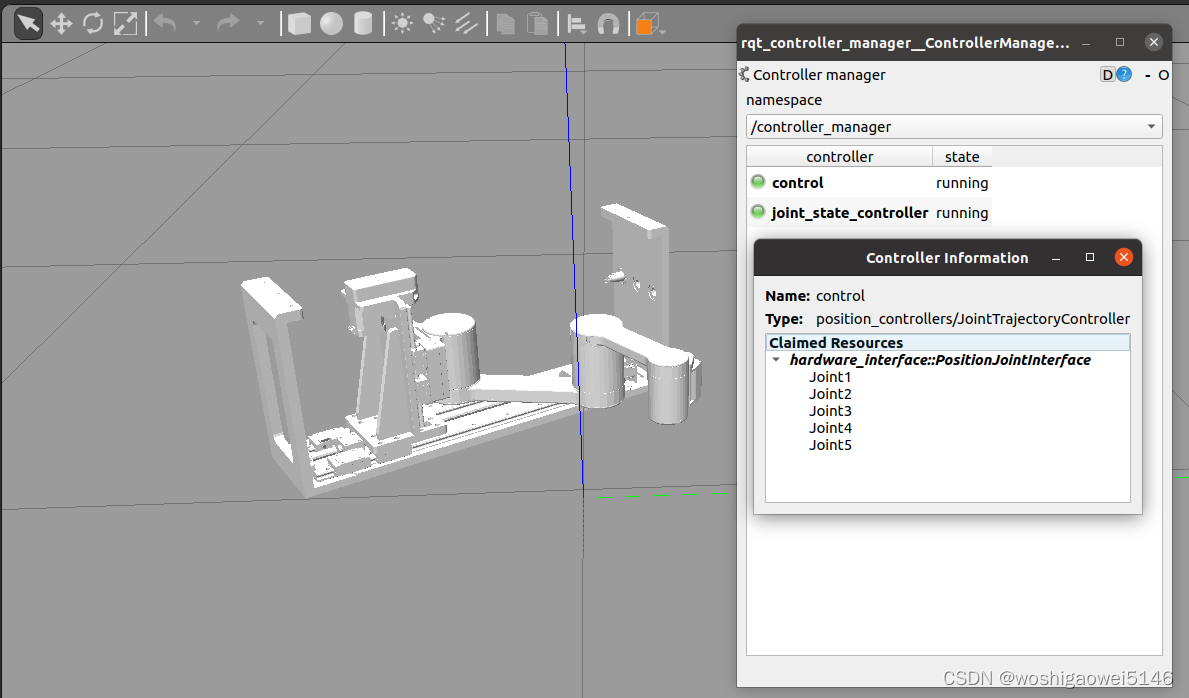
rqt_controller_manager
rqt插件,该插件以图形化方式加载,卸载,启动和停止控制器;同时用来显示加载的控制器的信息。
安装:
sudo apt-get install ros-noetic-rqt-controller-manager
运行:可以看到control和joint_state_controller两个控制器。
rosrun rqt_controller_manager rqt_controller_manager
故障问题解决
Spawn service failed. Exiting.
cmd /opt/ros/noetic/lib/gazebo_ros/gzserver -e ode worlds/empty.world
parse as old deprecated model file failed.
这三个错误往往一起出现,最后通过在urdf文件中添加解决:
filename=“libgazebo_ros_control.so”
https://blog.csdn.net/qq_60018807/article/details/128543981
ERROR: cannot launch node of type [controller_manager/spawner]: controller_manager接着一堆错误。
sudo apt-get install ros-kinetic-controller-manager
https://blog.csdn.net/weixin_45839124/article/details/106589576
模型自己转动,乱跑
sudo apt-get install ros-noetic-gazebo-ros-control
[ERROR] [1675950367.646886773, 0.307000000]: Failed to initialize the controller
[ERROR] [1675950367.649888591, 0.308000000]: Initializing controller ‘control’ failed
[ERROR] [1675950368.653177, 0.650000]: Failed to load control
在ros_controllers.yaml中添加前述代码。
[ERROR] [1675950605.984213275]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint1
[ERROR] [1675950605.988813331]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint2
[ERROR] [1675950605.991700327]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint3
[ERROR] [1675950605.995635439]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint4
[ERROR] [1675950605.999769977]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint5
添加修改ros_controllers.yaml文件:
/gazebo_ros_control:
pid_gains:
control:type: position_controllers/JointTrajectoryControllerjoints:- Joint1- Joint2- Joint3- Joint4- Joint5/gazebo_ros_control:pid_gains:Joint1: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint2: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint3: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint4: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint5: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }
但是加上以后发现Gazebo模型开始扭动起来,没眼看。最终无视这个错误即可。
https://blog.csdn.net/qq_32896521/article/details/111143282?spm=1001.2014.3001.5501
https://zhuanlan.zhihu.com/p/392635284
参考
https://blog.csdn.net/qq_34935373/article/details/95886151
https://ros-planning.github.io/moveit_tutorials/doc/gazebo_simulation/gazebo_simulation.html
http://www.guyuehome.com/890
https://blog.csdn.net/qq_41035283/article/details/120572465
http://wiki.ros.org/ros_control?distro=noetic